

Сенсорҳо барои тоза кардани роботҳо:Robot зидди афтидан
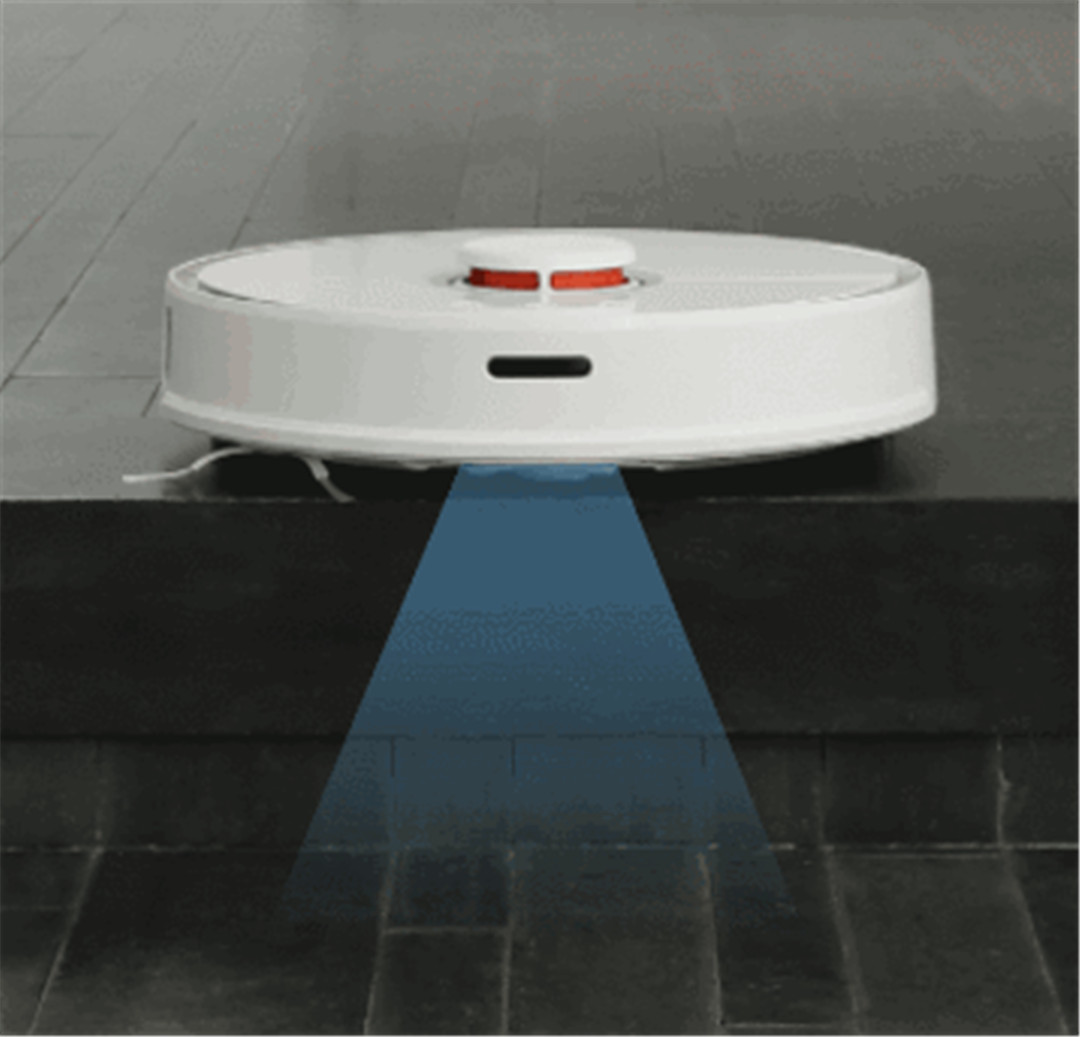
Робот метавонад ҳангоми ҳаракат ба чунин ҳолатҳо дучор шавад, ба монанди қадамҳои поён дар сатҳи роҳ ё замини ғарқшуда. Агар сенсори мувофиқ барои ҳис кардан ва андешидани амал мавҷуд набошад, робот дар хатари афтодан қарор дорад.
Бо насб кардани сенсори ултрасадо дар поёни робот, он метавонад муайян кунад, ки оё дар роҳ дар пеш қадамҳо вуҷуд доранд ё не, ва ҳарчӣ зудтар амалиётро қатъ кунад ё самти амалиётро бидуни тамос иваз кунад, то афтидан пешгирӣ кунад.
Сенсори диапазони ултрасадои DYP ба шумо вазъияти фазоии самти муайянкуниро пешкаш мекунад. Андозаи хурд, ки барои ҳамгироии осон ба лоиҳа ё маҳсулоти шумо тарҳрезӣ шудааст.
· Дараҷаи муҳофизати IP67
· Тарҳрезии истеъмоли қувваи кам
Ба шаффофияти объект таъсир намерасонад
· Насбкунии осон
· Вақти вокуниши танзимшаванда
· Муҳофизати қабат
·3см майдони хурди нобино
· Вариантҳои гуногуни баромад: баромади RS485, баромади UART, баромади гузариш, баромади PWM
Маҳсулоти марбут:
