
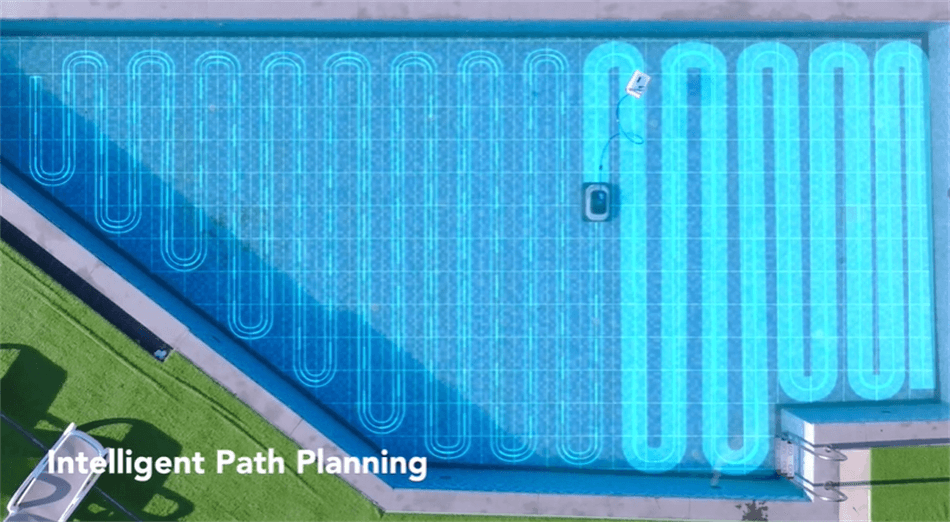
Бо рушди технологии роботҳои хидматрасонӣ, роботҳои ҳавзи шиноварӣ дар зери об ба таври васеъ дар бозор истифода мешаванд.Бо мақсади амалӣ намудани масирҳои банақшагирии худкор, камхарҷ ва мутобиқшавандадиапазони зериобӣ ултрасадосенсорҳои пешгирӣ аз монеаҳо ҳатмӣ мебошанд.
ВасеъБозор
То ба ҳол, Амрикои Шимолӣ ҳамчунон бузургтарин бозор дар рушди бозори ҷаҳонии ҳавз аст (Ҳисоботи бозори Technavio, 2019-2024).Дар Иёлоти Муттаҳида аллакай беш аз 10,7 миллион ҳавзҳои шиноварӣ мавҷуданд ва шумораи ҳавзҳои нав, асосан ҳавзҳои хусусӣ, сол то сол афзоиш ёфта, дар соли 2021 117,000 зиёд мешавад. Ба ҳисоби миёна ба ҳар 31 нафар як ҳавз рост меояд.Дар Фаронса, дуввумин бозори ҳавзҳои ҷаҳон, шумораи ҳавзҳои хусусӣ дар соли 2022 аз 3,2 миллион нафар гузашт. Ва шумораи ҳавзҳои нав дар як сол ба 244,000 расидааст, ки ба ҳисоби миёна ба ҳар 21 нафар як ҳавз рост меояд.
Дар бозори Чин, ки дар он ҳавзҳои шиноварии ҷамъиятӣ бартарӣ доранд, ба ҳисоби миёна тақрибан 43 000 нафар дар як толори варзишӣ машғуланд (дар кишвар 32 500 ҳавзи шиноварӣ мавҷуд аст, ки бар асоси шумораи аҳолии 1,4 миллиард нафар аст).
Испания аз рӯи шумораи ҳавзҳои шиноварӣ дар ҷаҳон дар ҷои чорум ва аз рӯи шумораи ҳавзҳои шиноварӣ дар Аврупо ҷои дуюмро ишғол мекунад, ки 1,3 миллион ҳавзи шиноварӣ дорад (хонаҳои истиқоматӣ, ҷамъиятӣ ва коллективӣ).
Муқоисаи бозори ҷаҳонии роботҳои ҳавзи Чин, андозаи бозори Чин камтар аз 1% ҷаҳонро ташкил медиҳад, бозори асосӣ ҳоло ҳам Аврупо ва Иёлоти Муттаҳида мебошад.Маълумот нишон медиҳад, ки дар соли 2021, ҳаҷми бозори ҷаҳонии роботҳои ҳавзи тақрибан 11,2 миллиард RMB, фурӯши беш аз 1,6 миллион адад, танҳо канали онлайни Иёлоти Муттаҳида.Интиқоли роботҳои тозакунандаи ҳавзи шиноварӣ дар соли 2021 ба беш аз 500 000 адад расид. Ва суръати афзоиши онҳо беш аз 130% буда, ба марҳилаи аввали рушди босуръат тааллуқ дошт.
Дар айни замон, бозори тозакунии ҳавз то ҳол тозакунии дастӣ бартарӣ дорад ва дар бозори ҷаҳонии тозакунии ҳавзи шиноварӣ тақрибан 45% тозакунии дастӣ, дар ҳоле ки роботҳои тозакунии ҳавз тақрибан 19% -ро ташкил медиҳанд.Дар оянда, бо афзоиши хароҷоти меҳнат ва маъруфияти технологияҳои саноатӣ, ба монанди дарки визуалӣ, дарки ултрасадо, банақшагирии роҳи интеллектуалӣ, Интернети ашё, SLAM (технологияи ҷойгиркунии фаврӣ ва харитасозии харита) ва дигар технологияҳои марбута, роботҳои ҳавзи шиноварӣ тозакунанда тадриҷан аз функсионалӣ ба интеллектуалӣ табдил хоҳад ёфт ва суръати воридшавии роботҳои ҳавзи тозакунӣ боз ҳам беҳтар хоҳад шуд.
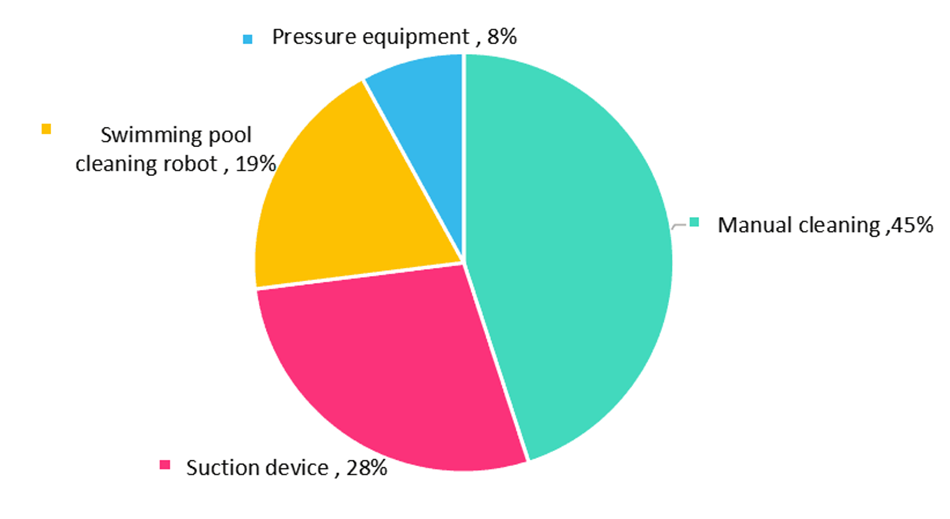
Сатҳи воридшавии бозори ҷаҳонии ҳавзи шиноварӣ дар соли 2021
Ҳисси махсус, сенсорҳои фарогирии зери об кӯмак мекунандшиноварйроботи тозакунандаи ҳавз барои пешгирӣ кардани монеаҳо оқилона
Сенсори ченкунии масофа аз монеаҳои ултрасадоӣ дар зери об як навъ сенсорест, ки дар канорагирӣ аз монеаҳои зериобӣ робот истифода мешавад.Сенсор технологияи ченкунии масофаи ултрасадо дар зери обро барои чен кардани масофаи байни сенсор ва объекти ченшуда истифода мебарад.Вақте ки сенсор монеаро муайян мекунад, масофаи монеа ба робот бармегардад ва робот метавонад мувофиқи самти насбкардаи сенсор ва баргардонидашуда метавонад истад, гардиш кунад, суст кунад, дар девор ҳаракат кунад, ба девор баромад ва дигар амалиётҳоро анҷом диҳад. арзиши масофа барои амалӣ кардани мақсади ба таври худкор тоза кардани ҳавзи шиноварӣ ва канорагирӣ аз монеа.
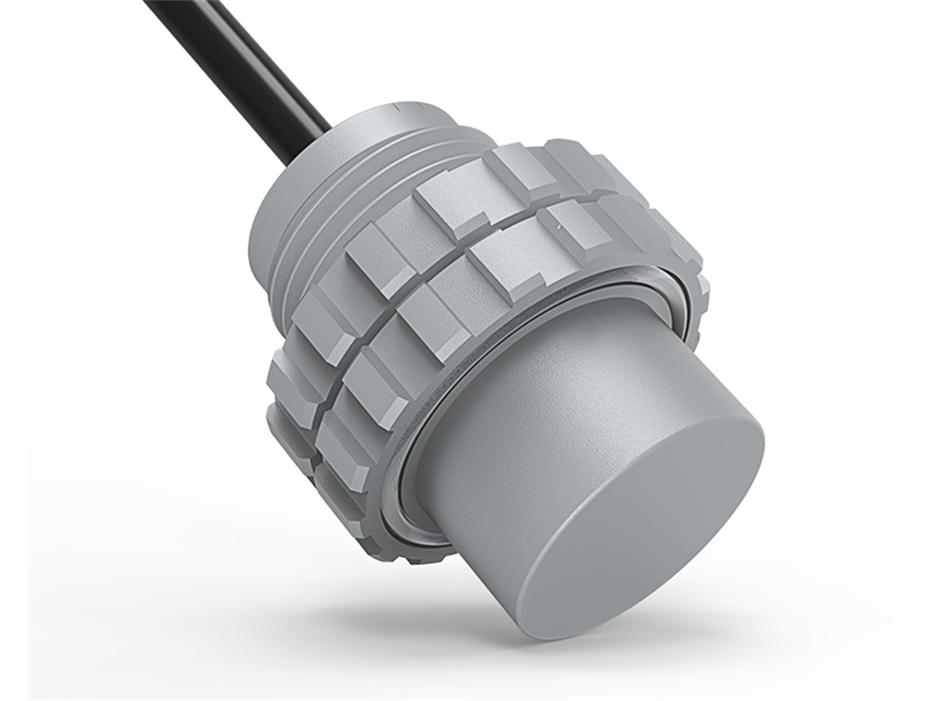
It меоядчere——L08 санҷандаро дар зери об
Тарҳбандии дурнамои сенсори DSP, таҳқиқоти мустақил ва таҳияи сенсорҳои диапазони зериобӣ тавассути конфигуратсияи сенсорҳои зериобӣ дар роботи зериобӣ, то роботи тозакунандаи ҳавзи шиноварӣ дорои вазифаи банақшагирии роҳи пешгирӣ аз монеаҳо бошад.
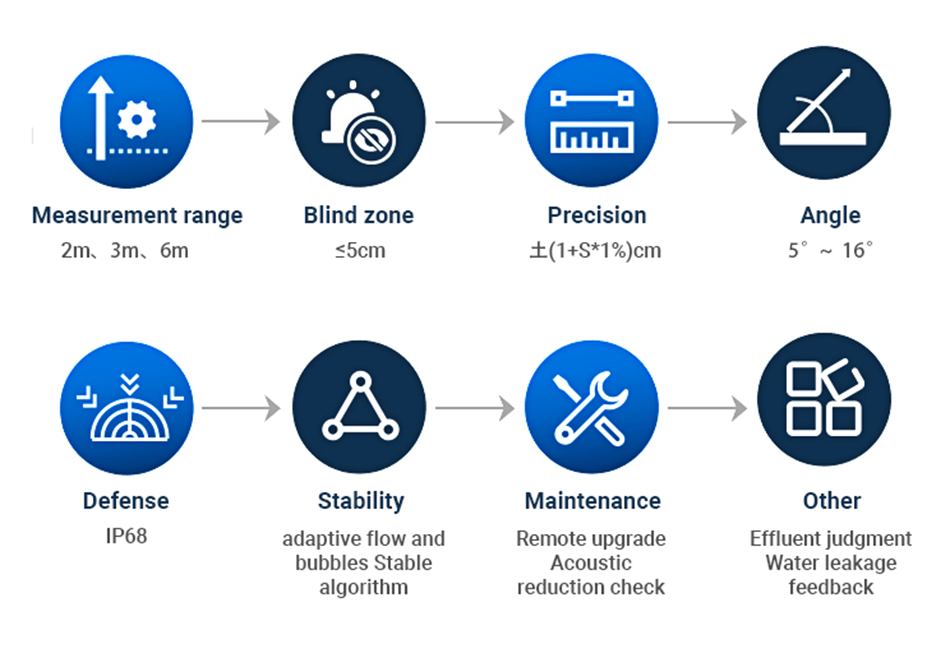
L08-модули сенсори ултрасадои пешгирӣ аз монеаҳои зериобӣ мебошад, ки барои барномаҳои зериобӣ пешбинӣ шудааст.Он дорои бартариҳои андозаи хурд, майдони хурди кӯр, дақиқии баланд ва иҷрои хуби обногузар мебошад.Дастгирии modbus protocol.There гуногун диапазон, мушаххасоти минтақаи кунҷи ва кӯр барои эҳтиёҷоти гуногуни истифодабарандагон интихоб.
Параметрҳои асосӣ:
Ҳадаф ба нуқтаҳои дард, навоварӣ кунед ва рахна кунед
Чӣ тавр ба роботи тозакунандаи ҳавзи шиноварӣ тавассути сенсори фарогирии зериобӣ тавонмандӣ бахшад ва ба дастовардҳои имконпазири технологӣ ноил шавад, ҳамгироии пурраи занҷираи хадамот ва ҳалли онҳо. Дианингпу ба тадқиқот ва рушди он нигаронида шудааст. Пас аз таҳқиқоти амиқ, мо ҳадаф дорем нуқтаҳои дарди бозор ва навоварӣ барои шикастани.
(1) арзиши баланди , аст, ҳеҷ роҳе барои маъруф намудани татбиқи маҳсулоти истеъмолӣ нест: зериобӣ санҷандаҳоро ошкор гуногун, ки дар хона ва хориҷа фурӯхта, нархи аст, аз ҳазорҳо юан.Одамон аст, хеле ҳассос ба роботҳои истеъмолӣ арзиши, то ки онҳо метавонанд дар айни замон васеъ истифода намешаванд.
Дар якҷоягӣ бо талаботҳои мақсадноки арзиши роботҳои истеъмолии зериобӣ, ширкат мустақилона параметрҳои мутобиқати трансформатор, маҳаллисозии маводи асосӣ ва таҷрибаи истеҳсоли оммавиро таҳқиқ ва таҳия кард.Арзиш то камтар аз 10% -и саноат кам карда шуд, ки дар қабули сенсорҳои зериобӣ дар электроникаи маишӣ пешрав буд.
(2) Мутобиқати заифи параметрҳои сенсор дар бозор: сенсор дур аст, майдони кӯр хурд аст ва параметрҳои мувофиқи кунҷ дар бозор дастрас нестанд, ки аксар вақт омезиши сенсорҳои гуногунро талаб мекунад ва арзиши комбинат баланд аст.
Табдилдиҳандаи дубасомади бисёрқабата таҳия шудааст, ки параметрҳои баландсифати масофа, майдони кӯр ва кунҷро ҳал мекунад.
①Кунҷи бисёрқабата ба 90 ° наздик аст ва диапазон метавонад зиёда аз 6 метрро қонеъ гардонад, ба минтақаи нобино дар ҳудуди 5 см мувофиқат кунад ва мутобиқати сенарияҳои татбиқ хеле баланд аст.
② Маводи асосии сенсори ултрасадо ин табдилдиҳандаи плитаи сафолӣ мебошад, ки маҳсулот басомади радиалӣ ва ғафсӣ аз схемаи тарроҳии оқилонаи плитаи сафолиро қабул мекунад ва сипас тавассути мутобиқсозии гардонанда ва мутобиқсозии филтркунии банд-гузариш, басомади резонанси басомади радиалӣ паст аст, кунҷи андозагирӣ калон аст, басомади резонанси ғафсии басомад баланд аст, воридшавӣ қавӣ аст, масофаи андозагирӣ дур аст ва параметрҳои майдони хурди кӯр ба назар гирифта мешаванд.
(3) Дар муҳити мураккаби зериобӣ ноустувор аст: вақте ки оби ғафс, ҷараёни зиёди об, алафи оби зериобӣ вуҷуд дорад, маълумоти сенсор асосан ноком мешавад, ки дар натиҷа робот наметавонад амалиётро оқилона доварӣ кунад.
Мушкилоте, ки дар муҳити мураккаби зериобӣ истифода мешавад, тавассути омезиши оқилонаи алгоритми дугонаи басомади бисёрҷабҳа ва мутобиқшавӣ ва коркарди филтрҳои Калман ҳал карда мешавад.Суперпозицияи бартариҳои басомадҳои гуногун, гардонандаи интеллектуалии бисёрҷабҳа, диверсификатсияи режимҳои корӣ, қудрат, кунҷ, сифати сигнал метавонад ба тағирёбии саҳна мутобиқ шавад.
Сохтор ва равандҳои маҳсулот:
(1) сохтор аз рӯи намуди оддӣ, андозаи хурд аст, насб танҳо лозим аст, ки сӯрохи тавсияшударо дар қабат гузоред, то чормағзро мустаҳкам кунед, маълумотҳои муқаррарии баромади таҷҳизотро пайваст кунед, ки насб анҷом ёфтааст;Нигоҳдории баъдӣ танҳо лозим аст, ки чормағзро даргиронед, то сенсорро хориҷ кунед, кори оддӣ, арзиши омӯзиши насб ва нигоҳдорӣ кам карда шавад.
(2) раванди маҳсулот, табдилдиҳандаи технологияи диапазони ғайритиҷоратӣ, сохтори ҳамгирошудаи пӯшидаро истифода мебарад. Ва тамоми мошин тарҳи чанг ва обногузарро қабул мекунад.Схемаи дохилӣ аз ширеши қатрони эпоксиии кӯза муҳофизати пурра печондашударо истифода мебарад, таъсири обногузар метавонад ба сатҳи IP68 расад.
Тадқиқотiвобастаlyвафунксияи боэътимод
Дар раванди таҳияи сенсор, дастаи R&D параметрҳои бисёрҷанбаро ба монанди устувории додаҳо, таъсири ҷараёни об, басомад ва истеҳсолот такроран оптимизатсия ва такрор кард.Ва озмоишҳои бисёрҷанбаро бо шароити воқеии кори роботи тозакунандаи ҳавз барои беҳтар кардани мутобиқати сенсор ба муҳити зист ва шароити корӣ зич анҷом доданд.
Дар айни замон, Дианингпу ҳамеша аз технология, сенсори диапазони зериобӣ ҳамчун ҷузъи андозагирӣ нигоҳ дошта, дар муқоиса бо тарҳрезӣ ва ислоҳкунӣ, истеҳсол ва калибрченкунӣ муҳимтар аст, ба таври синхронӣ маҷмӯи мукаммали санҷиши санҷандаҳои зериобӣ ва системаи калибрченкуниро таҳия кардааст.
Дар асоси системаи санҷиш ва калибрченкунӣ, сенсор аз озмоишҳои эътимоднокӣ, аз қабили нигоҳдории ҳарорати баланд ва намии баланд, озмоиши зарбаи гарм ва хунук, озмоиши пошидани намак, озмоиши пиршавии босуръати ултрабунафш, озмоиши тарки бараҳна, озмоиши таъмидкунии моеъ (озмоиши зангзании зериобӣ) гузаронида шуд. , озмоиши обногузар фишори вакуумӣ, ки дар ҳар як такрори прототип гузаронида мешавад.
Пас аз пайваст кардани сенсор бо бадани робот, кори тамоми мошин дар тӯли ҳазорҳо соат дар якҷоягӣ бо муҳити воқеии кории робот санҷида мешавад.Ҳосили ин сенсор дар истеҳсоли оммавӣ бештар аз 99% аст, ки онро таҷрибаи бозории истеҳсоли партия тасдиқ кардааст.
Ҷамъшуда, L08 идома хоҳад доднавсозӣ
Роҳи рушди сенсорҳои зериобӣ: тадқиқот, ҳамгироӣ, навоварӣ, санҷишро баррасӣ кунед.Ҳар як гиреҳ як навоварии шуҷоъ, ҷустуҷӯи сахт ва ҷамъоварии бои нерӯ дар соҳаи технология мебошад.L08 аввалин маҳсулоти ширкати ултрасадои зериобӣ мебошад.Ширкат маҳсулоти бештареро дар асоси роботи зериобӣ канорагирӣ аз монеаҳои зериобӣ ва иктишофи умқ ба роҳ мемонад.
Дар оянда, бо пешбурди роботҳои зериобӣ, сенсорҳои фарогирии зериобӣ ҳамчун дастгирии калидӣ барои ҳассосияти интеллектуалии роботҳои зериобӣ, бешубҳа, дар соҳаи роботҳои зериобӣ ва соҳаи роботҳои зериобӣ тағироти бузург ба бор хоҳанд овард.
Вақти фиристодан: 04-04-2023